Quadrotors
Recoil 6" (2017)
6 inch lightweight racing copter with F80 motors

Recoil XL (2017)
4 inch racing copter with xnova 1407 motors




Recoil (2017)
3 inch racing copter (AUW < 125g)


derbe evo (2016)
First aeropod in the world! Has served me a long time on many competitions!



0815 (2015)
Standard 250 racing frame

DERBE (2015)
Tilted body, vertical arm racing copter




QRC5 (2015)
First-ever tilted body, vertical arm racing copter

The QRC5 is a 5 inch (250 class) tilted-body FPV racing quadrotor. It incorporates some ideas that I had when I was designing the GEMiNi and the HEXO+.
First of all, it's not a hex- or trirotor anymore, it is one of my
first quadrotors... Personally, I think quadrotors are a bit boring. But
there are many FPV racing events coming up, and I am sure that most of
them will have several different regulations and limit the battery
voltage, the amount of motors or the rotor diameter. The most 'standard'
racing copters are quadrotors with 5" props. I
am sure that they will get their own racing class. I would like to be
able to compete with them, therefore I decided to design a copter for
this standard class, even when I am not the biggest fan of quadrotors or
racing rules and classes.
 |
| QRC5 in the 2015 FPV Airrace in Bexbach |
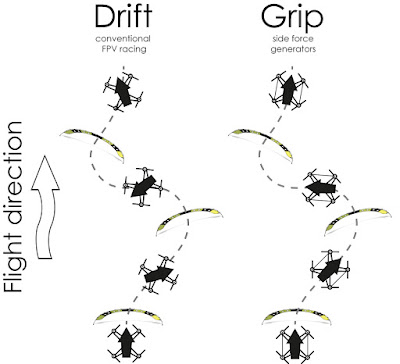
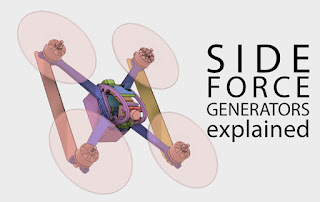
Tilted propellers have become popular since the GEMiNi
was presented, and in my opinion they really have an advantage. The
aerodynamic drag is reduced quite a bit in fast forward flight. And,
also important, the drag is increased in slow flight and during braking.
This part becomes important on racetracks with sharp corners.
The QRC5 does not really have tilted propellers, but a tilted body (which is very similar). When only the body is tilted, there is little vertical offset between the propeller disks, which seems to be advantageous for the flight control.
The QRC5 does not really have tilted propellers, but a tilted body (which is very similar). When only the body is tilted, there is little vertical offset between the propeller disks, which seems to be advantageous for the flight control.
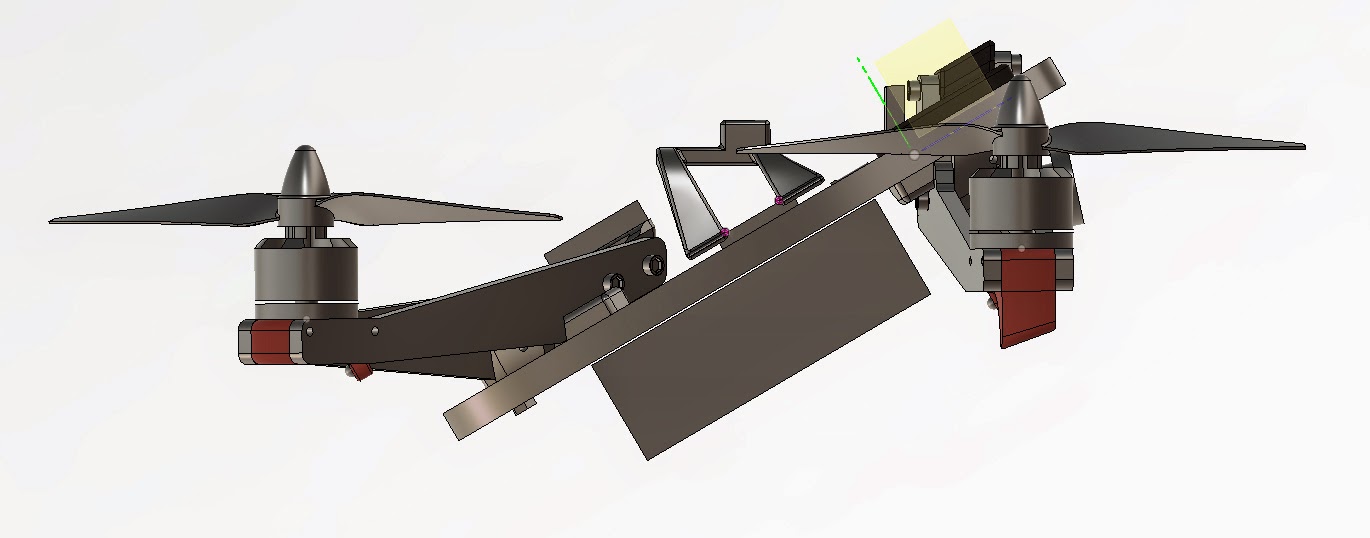 |
| The body is tilted 30° backwards, leaving the propellers on a relatively similar plane |
 |
| Top view: The flat arms are parallel to the main flow direction |
I'll again use the 'CCD-Killer' CMOS camera by Fatshark. For me, this
is still the best camera, even much more expensive CCD cameras don't
give such a great image. The camera is tilted 13° up (with respect to
the propellers).
 |
| The CCD-Killer sits between the arms |
I had the chance to fly a few batteries in FPV mode, and it's really great fun. The top speed and throttle response is very good, the inertia in tight turns is also not too high although the copter weighs around 400g.
Here's a short Dom HD capture video:
https://youtu.be/vb1vUaXegBQ
And here is a video from the 2015 FPV airrace in Bexbach, shot from a different quadrotor. It was an intense battle and the video ends with a nice midair collision...:
https://www.youtube.com/watch?v=spWIOJJTJzc







Hello,
ReplyDeleteany other external video?
or true picture?
and about the price?
fr0sti
Hi, here's an "external" video of it:
Deletehttps://www.youtube.com/watch?v=spWIOJJTJzc
That video ends with a crash. The QRC5 is currently still damaged and waits for me finding some free time to repair it...
...and there's no price, because this is my hobby...
DeleteHi william. Congratulations for the whole project. I do not know if you have already pubblished your firmware with GPS and pressure transducer. I am interested to take a look in it if you do not mind. Thanks in advance for your prompt reply...
ReplyDeleteIannis Iliopoulos (Electronic engineer)
do you have any plans that you're willing to share or sell?
ReplyDeletei still haven't decided on the frame that i'll start this hobby with, but i'm sure its gonna be a 250 frame. there is overwhelming number of frames out there, from tilt arms to fixed. this and Derbe is in the top 5. when i finally finish up my cnc machine i want to be make the frame myself...
Watch WRC Mexico Rally 2016 Online Live on your smartphone,
ReplyDeleteon your computer or tablet..
Stream 1 : www.watchwrconline.com
Stream Link : www.watchwrconline.com