I've been flying the derbe evo for a while now, and it is very agile and fast. I had to reduce the PD parameters by 30%. This is due to the fact that the mass is closer to the centre of the copter, and that reduces the moment of inertia. I was flying a competition with the derbe evo already (Hannover Cebit FPV Cup,
here's a video). Unfortunately, the derbe evo crashed very hard during the qualifying (the gates were made out of massive steel, and the video reception was very poor). I think, I was frontally hitting a metal tube, and the 3D printed frame broke (two Cobra motors also have a bent shaft - I had to replace them as I do not manage to remove the shafts).
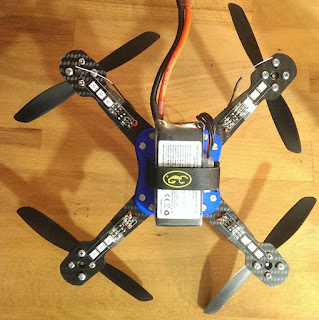
I implemented some modifications in the new version. The camera angle (wide angle lens) is now 35° (instead of 25°) to allow for higher pitch props. The 3D printed frame is thicker. And the power conncetor is now integrated in the frame. Additionally, I added a small button for the TBS unify pro to change channels comfortably.
There are many competitions this year that I am planning to attend, therefore I will most likely make another derbe evo frame as backup.
- Flying Fischkopp vs. Kloppokopter vs. FPV Nutz (16. April 2016)
- FPV Drone Master (30. April 2016)
- FPV Race Friedewalde (07. May 2016)
- Copter Clash Hannover (28. May 2016)
- Bexbach German Master (27. August 2016)
 |
| RGB LEDs are mandatory on some events... |
 |
Increased camera angle. The ultra-large capacitors
might keep my ESCs and motors from dying all the time
(I lost 4 motors due to ESC malfunction already). I also added a
pull-down resistor (10k) to the signal wire of each ESC. |
 |
| Pushbutton for channel selection & integrated power plug. |
 |
| 'Last christmas, I gave you my....' |






This comment has been removed by the author.
ReplyDeleteHey William, the new derbe is looking good. You have indeed come a long way since your start at the roboternetz thread. As soon as my cnc is working, i would like to support your work. Should you ever happen to need some machined aluminum parts for your MAV, dont hesitate to contact me. regards from Hamburg/Andy
ReplyDeleteHi Andy, danke sehr, schreib mir doch bitte mal eine Mail an Shrediquette @ g m x . d e damit wir in Kontakt kommen!
DeleteHey William,
ReplyDeleteyou are way ahead of me. I have been thinking about the Aerodynamics of my quadcopter and that all the flat surfaces, especially the arms, didn't completely make sense to me. I played with the idea to put the arms on their side. So I was very existed when I found your blog and saw the you already incorporates the idea.
In the mean time I designed an X frame with the arms on their sides, clearly I'm not moving as fast as you and should check your blog more often. I was first working on a acro LOS version with a streamlined body and motorpots, not including FPV gear. Secondly, after creating a flying prototype, I wanted to move on to a FPV version which your already did.
But very cool to see your developments and also measurements in the windtunnel.
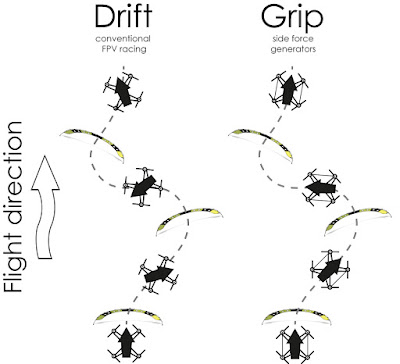
Your post on aerodynamics part 2 was amazing. Clearly dont have the knowledge and resources you have when it comes to aerodynamics. When you think about it the propeller/thrust part, it completely makes sense when its in front of you. Based on the windtunnel results the next step could of course be to turn the back arms more horizontally, aligning better with the airflow. However this is al based on fast forward flight. The arm setup, especially when they would be asymmetrical, could have different side effects when the direction of flight is not fast forward or when there is side wind for example. Therefor I'm now wondering if it doesn't make sense to use round arms, which should be more aerodynamic and the direction of airflow is less important. A round arm with the same size as a flat arm would be more aerodynamic and the diamater could be less and still have the same strength. this is the direction which I'm now heading and will keep a closer eye on your blog.
With kind regards,
Ronald
Hi Ronald, thanks for your message! I will also go for tubes as arms, but I would prefer a hexagonal shape. I didn't check yet if this is available in aluminum or carbon fibre...
DeleteHello William,
ReplyDeleteThank's for your great work. Can you give us some information about the FC size on the design? because i dont find any that fit into.
And second question, will you release the design that we can modify it to fit other hardware ?
thank's
Laurent
Impressive design! I love they way arms are integrated within the canopy. Do you think about releasing a version compatible with the widely popular ZMR 250 3/4mm arms? Thanks!
ReplyDelete