Recently, I discovered some small counter-rotating propellers that I didn't know before. I ordered some and did some tests. The red
4x4.5" props look really good, nice thin airfoils and a good precision. During the tests, they made the least amount of noise, and are currently my preferred ones. The performance of the 4x2.5" props is even better, but they have a pretty terrible sound and seem to be less balanced. Both propellers outperform the AirAce propellers, but this is not really a surprise because the AirAce have a smaller diameter and more blades. What is also interesting is the weight of the propellers. A propeller with a lower weight potentially has a lower moment of inertia which is beneficial for the control loops:
- AirAce: 2.1 g
- 4x2.5": 1.5 g
- 4x4.5": 1.3 g
So this is an advantage for the
4x4.5" propellers, especially because the weight of this propeller is more concentrated to the center, which should further lower the momentof inertia.
The difference in endurance is quite dramatic, up to additional 2.5 minutes (+20 %) are possible when using the 4x2.5" instead of the AirAce.
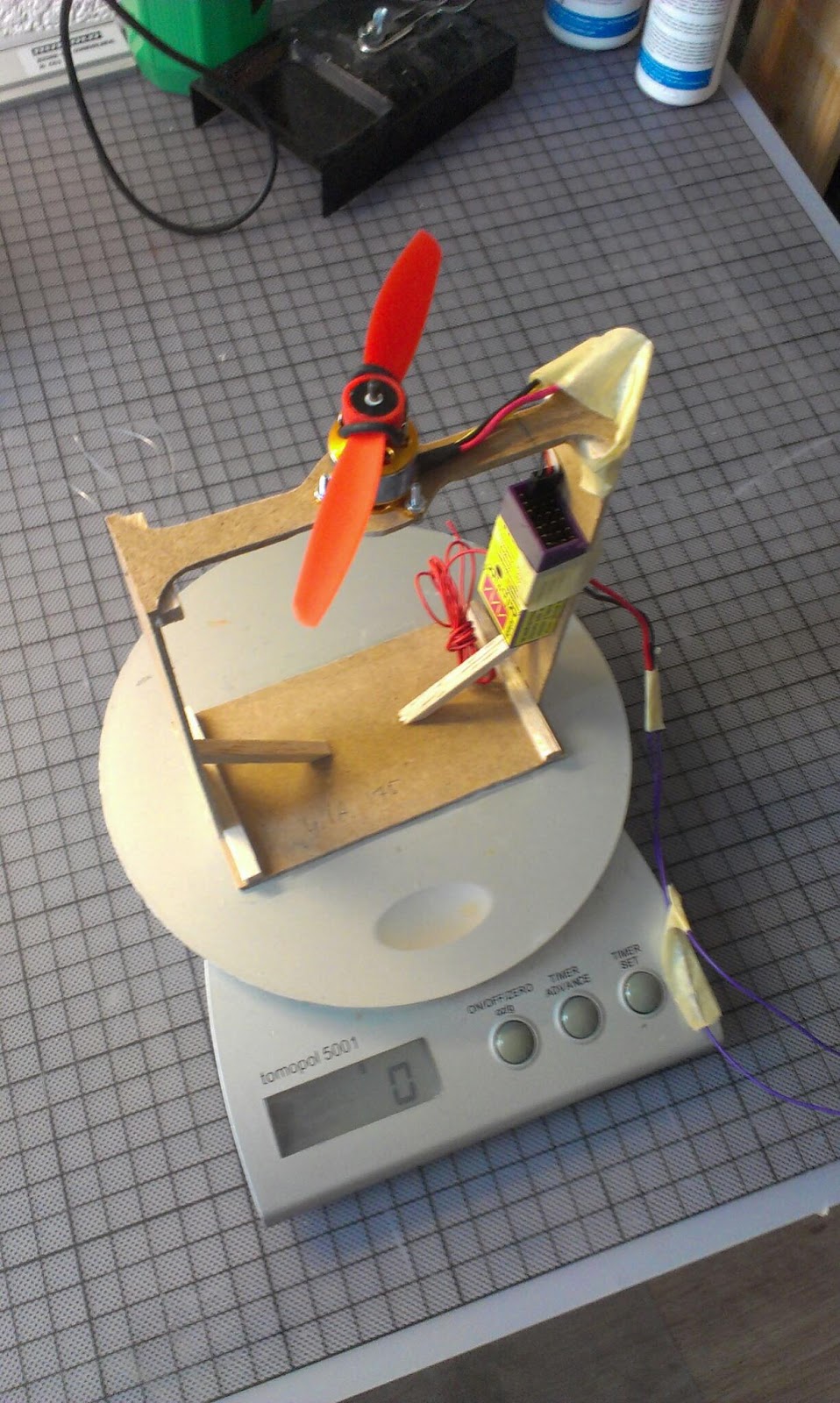
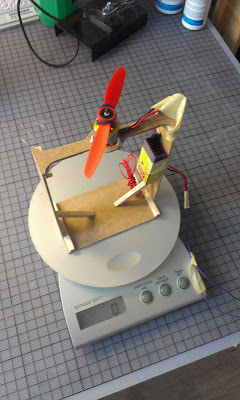 |
| Test setup |
 |
| Left to right: 'AirAce', '4x4.5', '4x2.5' |
 |
| Static thrust vs power input (@ 12 V) |
 |
| Endurance vs take-off weight |




{kind=link}
{kind=link}
Kann man die 4x2.5 nicht gut ausbalancieren? Weil die Performance ist doch um einiges besser....
ReplyDeleteKann man bestimmt relativ einfach machen. Ich habe mich für die 4x4.5 entschieden, weil die deutlich leiser sind, ohne "Gefummel" auf die Motoren passen (und deutlich besser aussehen...)
DeleteDanke. Ich möchte gerne mit den gleichen Motoren einen Quadcopter machen, auch mit CCD. Frame mit einem 3-D Drucker. Gleiche Prop für FPV-Fliegen.
DeleteWie hast Du en die 4.4x5 auf die Motoren fixiert? Klebstoff?. DU hast die Prop ja nur aufgesteckt, oder?
Die Propeller sind auf 7mm aufgebohrt (Geht viel einfacher als bei "normalen" Propellern) und dann auf die Motorglocke gesteckt. Ein Tropfen Sekundenkleber sichert die Propeller.
DeleteSuper. Danke Dir für die Hilfe
ReplyDelete